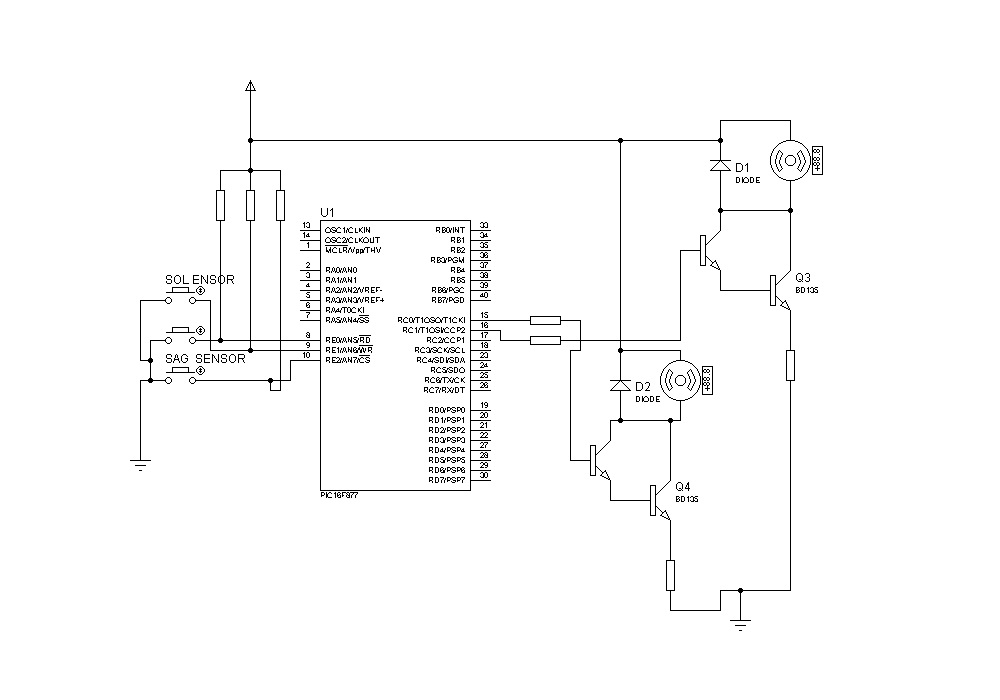
Sensörler yardımı ile çizgi takip eden araba
Deney Amacı: PIC 16F877 programlanması ve elektronik devre dizaynı
Deney Mazemeleri:
*3 adet sensör
*1adet opamp entegresi
* 1adet sensör hassasiyet ayar düğmesi
*1adet kristal osilatör
*1 adet reset düğmesi
*3 adet led
*1adet 16f877 pic
*2 adet güç transistörü
*2 adet 22 ohm 1waat drenç
*2 adet bc 256 transistör
*4 adet mercimek kondansatör
*8 adet drenç
*2 adet kondansatör
*1 adet çift motorlu oyuncak araba
Deneyin yapılışı: Baskı devresi çizili olan kağıdı bakır plakaya yapıştırarak yada bakı kalemi ile bakır plaka çizilerek devre şeması çıkarılır.Hazırlamış olduğumuz karışımın (tuz ruhu ,phidrol) içine atarak bakır levhada sadece devre şemasının kalana kadar bekletiriz.Dikkat etmemiz gereken husus karışımın ayarını iyi yapmak, baskıdaki çizgilerin(devre yolları) birleşmemesi ve silinmemesidir.Devreyi bakır plakaya çıkardık dan sonra gerekli yerlerden delinerek lehimleme kalır.Burada da doğru yönde dikkat etmek gerekir.
PİC’e aşağıdaki programı yükleyip yerine takarız.
LIST P=16F877
INCLUDE "P16F877.INC"
__CONFIG(_WDT_OFF&_XT_OSC&_PWRTE_ON&_CP_OFF)
START
BSF STATUS,5
CLRF TRISC
MOVLW H'07'
MOVWF TRISE
MOVLW H'07'
MOVWF ADCON1
BCF STATUS,5
CLRF PORTC
MOVLW H'FF'
MOVWF PORTE
DONGU
BTFSS PORTE,0
CALL DUZ
BTFSS PORTE,1
CALL SAG
BTFSS PORTE,2
CALL SOL
GOTO DONGU
SAG
MOVLW H'02'
MOVWF PORTC
RETURN
SOL
MOVLW H'01'
MOVWF PORTC
RETURN
DUZ
MOVLW H'03'
MOVWF PORTC
RETURN
END
Sensörler beyaz renge duyarlı olduğu için siyah zemin üzerine beyaz çizgi(sensörlerin plakasının genişliğinde) çizilir.Dönüşler ani olmazsa verim daha iyi olur.Sağa dönmek için sol motor ,Sola dönmek için sağ motor dönmeli, iler içinde her iki motorda aktif olmalıdır..
Sonuç:Böyle bir robot yamak için pic 16f877’nin programlamasını,elektronik malzemelerin hakkında her türlü bilgiyi,baskı devre yapımını öğrenmiş olduk…